

Game playing is an excellent domain for robotic experimentation. Something as simple as playing a game of chess with a human encapsulates reasoning, learning, sensing, manipulation, and human interaction. The goal of this project is to demonstrate all of these capabilities on a small-scale manipulation platform. Using a robot developed by Intel Labs Seattle, this project attended and took first place in the 2010 AAAI small-scale manipulation challenge.
This project is affiliated with the Robotics and State Estimation Lab. The Gambit robot is a manipulator arm developed in a collaboration between Intel, UW, and Alium Labs in 2010, designed for small-scale manipulation. It is a 6 degree-of-freedom arm with a 60 cm working radius; the system includes a low-cost Kinect RGBD camera/depth sensor, as well as a very small camera mounted inside the robot's gripper for up-close work.
The robot's abilities were initially demonstrated in game-playing. The arm is now being used in research focused on interacting gracefully with a human in a collaborative environment, rather than in competition.
Playing Chess with Gambit
We used chess as in initial testbed for the Gambit robot. Historically, chess has been seen as an interesting task for artificial intelligence; however, work has focused on reasoning aspects of the problem. Handling different kinds of chess pieces, detecting human actions, perceiving the chessboard, and so on are an entirely distinct set of problems. In addition, the AAAI small-scale manipulation challenge, which focuses on chess, makes it possible to compare approaches and tools with other researchers working on the same task.Playing with Toys
Playing with toys such as LEGO and blocks, with a human "playmate", takes advantage of the RGBD perception and fine manipulation developed for the chess challenge, while relaxing some of the constraints of that problem—for example, strict turn-taking and a discretized playing field. Our goal is to learn to follow a playmate's instructions in a small number of interactions.Project publications
-
Gambit: A Robust Chess-Playing Robotic System
C. Matuszek, B. Mayton, R. Aimi, M. P. Deisenroth, L. Bo, R. Chu, M. Kung, L. LeGrand, J. R. Smith, D. Fox. ICRA 2011.
|
Video: Gambit playing chess |
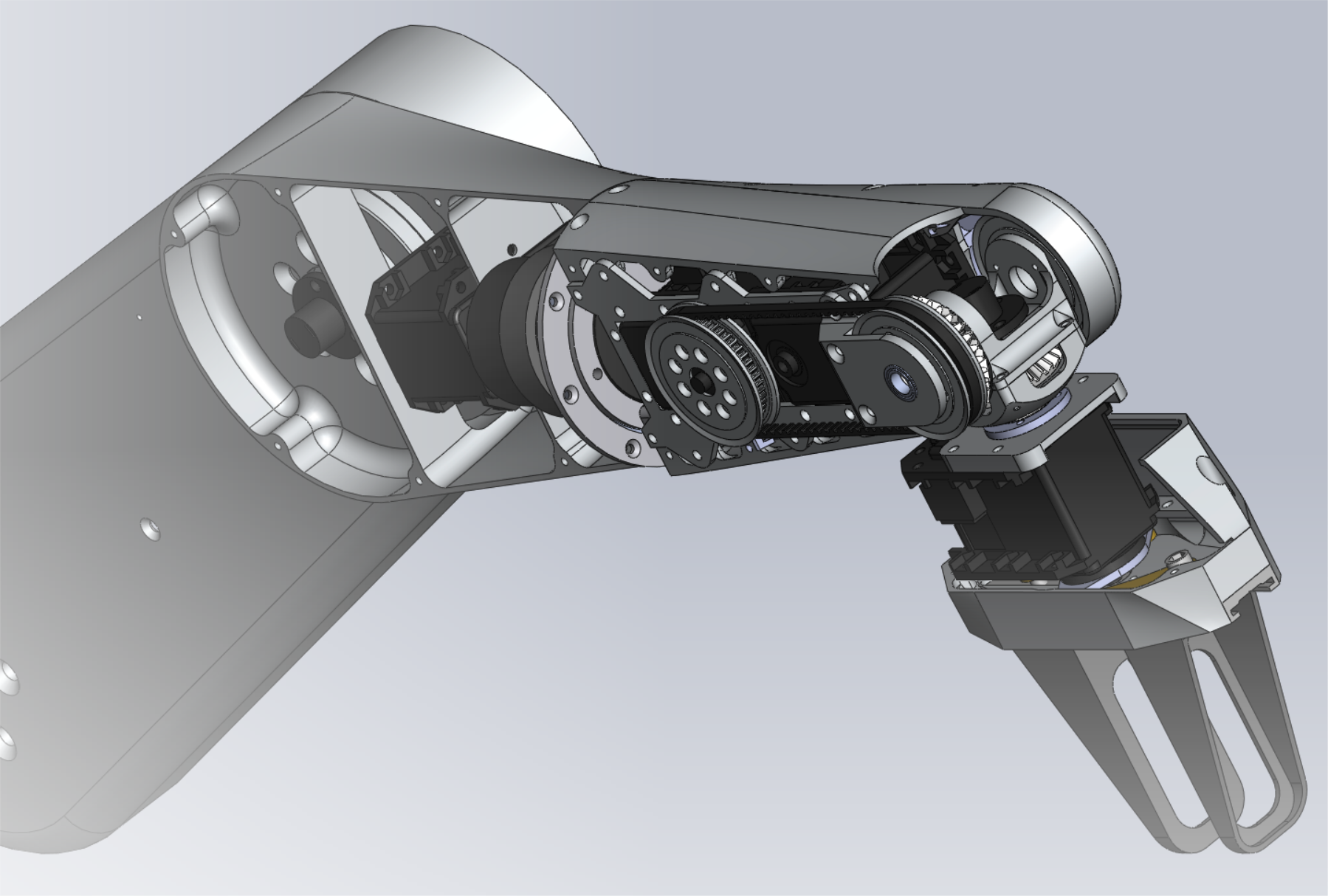
An exposed view of the inside of the Gambit arm |
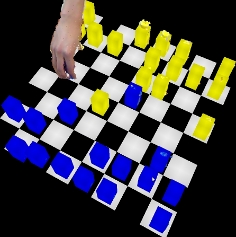
A chessboard, as seen by a prototype RGBD camera |
Video: Gambit's capabilities and research goals |